Hola, mi nombre es Henry David Alvaro simbaña tengo 19 años, soy de la cuidad de Quito, hace ya un año que ingrese a la Escuela Politécnica Nacional en la facultad de mecánica, en los dos semestres que llevo en la escuela he pasado todas la materias de primera fue un trabajo arduo y en el presente semestre planifico lograr lo mismo.
Mi meta a futuro es graduarme con el titulo de ingeniero mecánico y enseguida continuar mis estudios para sacar una maestría en lo que me apasiona lo cual es la Nanotecnología, es una ciencia que me cautivo desde la primera vez que escuche de ella, antes de ella la verdad no sabia que hacer después del colegio, ahora esta ciencia no la han desarrollado en el país, lo cual me obligaría a estudiar en el extranjero en fin espero cumplir con esta meta.
Tengo muchas expectativas sobre la materia de Cálculo Vectorial, al recibir la primera clase me di cuenta que es muy dinámica lo cual es bueno para el aprendizaje, esta materia me va a encantar debido a que me gustan mucho los calculos y en si la geometria en el espacio dicho esto espero una excelente enseñanza de parte de mi profesora.
domingo, 12 de abril de 2015
martes, 7 de abril de 2015
EVIDENCIAS
TAREAS Y CORRECCIONES
PRIMER BIMESTRE
Tarea 1
Tarea 2
Tarea 3
Tarea 4
Tarea 5
Corrección 1
SEGUNDO BIMESTRE
TAREA
CORRECCION
JULIO
CAMPOS VECTORIALES















El teorema nos dice que podemos evaluar la integral de línea de un campo vectorial conservativo ( el campo vectorial gradiente de la función potencial f) con solo conocer el valor de "f" en los extremos de C. De hecho el teorema nos expresa que la integral de línea de EL GRADIENTE DE LA FUNCION es el cambio total de "f". Si "f" es una función de dos variables y C es una curva plana con punto inicial A(X1, Y1) y punto final B(X2 , Y2), entonces el teorema se convierte en:

.png.jpg)


.png.jpg)
un campo vectorial se define como un vector en dimensión n, dicho vector posibilita la descomposición de
de dicho campo en distintos vectores, con la ayuda de una función.
 |
| figura 1: Campo vectorial. |
INTEGRAL DE LINEA
La integral de linea se asemeja a la integral que se realiza con la suma de Riemann , la diferencia es que en la integral normal se analiza dentro de un intervalo ya sea en el eje x o en eje y, en la integral no se analiza el intervalo, sino que se analiza la integral de el recorrido de la curva que se analiza.
Es posible analizar la integral de linea en campos escalares y en campos vectoriales:
INTEGRAL DE LINEA EN UN CAMPO ESCALAR:

Sea la curva C, en el plano xy, definida por las ecuaciones para métricas x=x(t) e y=y(t) con a<=t<=b, esto es equivalente a decir que la curva C está definida ´por la función vectorial
g: R=R^2/g(t)=(x(t),y(t))
, en donde las
primeras derivadas de x (t) e y (t) son continuas para a ≤t ≤ a. Se toma ahora una
partición del intervalo del parámetro [a,b], con n subintervalos de igual
longitud, de manera que xi*=x(t*i) e y*=y(t*i) quedando así
dividida la curva C en n subarcos . Se elige ahora un
punto genérico .
Ahora bien, sea f una función cualquiera de dos variables en cuyo dominio esta
incluida la curva C, obteniendo la imagen de la función f para el punto ( x*i,y*i) , se
multiplica esta por la longitud i ∆s del subarco, realizando este procedimiento para
todos los puntos sobre la curva se puede generar la siguiente suma

La integral de linea de un campo escalar viene dada por :
Esta fórmula se la aplica con la curva parametrizada, ya sea en dos o en tres dimensiones, las formulas quedarían:

Dado que tambien se trabaja en 3D la formula quedaria:

Metodos basicos de parametrizacion




Ejemplo práctico:
INTEGRAL DE LINEA EN UN CAMPO VECTORIAL

La integral de linea en un campo vectorial se obtiene de la integral de el producto punto entre el vector de la funcion primaria evaluada en su vector parametrizado y el gradiente del vector parametrizado:

Ejemplos:


TEOREMA FUNDAMENTAL DEL CÁLCULO:
para definir si el campo es conservativo se debe seguir el siguiente procedimiento:
- Según el numero de componentes que tenga el campo vectorial derivar parcialmente con respecto a las variables restantes.
- hacer esto con cada una de las variables.
- comprobar si todas las derivadas parciales son iguales.
- Dado un caso positivo se hará la la integral de cada variable con su respectivo eje y la constante característica sera en función de las demás variables.
- Comparar e igualar todas las ecuaciones.
- Se comparará la repuesta sacando el gradiente de la función obtenida y esta será igual a la funcion que inicialmente se analizó.
DEPENDENCIA O INDEPENDENCIA DE LAS INTEGRALES DE LINEA:
Una cuestion que se debe plantear e relación a las integrales de linea y superficie es si dependen de la parametrización elegida r y s.
La respuesta será diferente para ampos escalares y vectoriales.
- La integral de linea y de superficie de campos escalares son independientes de la parametrización elegida.
- La integral de linea de un campo vectorial dependerá de la orientación elegida.
TEOREMA DE GREEEN


Las condiciones para que se cumpla este teorema son que la curva analizada sea cerrada y que la dirección en la que se analiza la curva debe ser antihoraria (dirección positiva).

ROTACIONAL:
El rotacional de un Campo vectorial es un proceso de mayor confianza para saber si un campo vectorial es conservativo o no, el proceso se detalla en lo siguiente:

si el rotacional es igual a cero significa que el campo es conservativo.
DIVERGENCIA
La divergencia se define como el producto escalar de un gradiente por un campo vectorial F. Este resultado mide la diferencia entre el flujo entrante y el saliente de dicho campo vectorial.
La divergencia se define como el producto escalar de un gradiente por un campo vectorial F. Este resultado mide la diferencia entre el flujo entrante y el saliente de dicho campo vectorial.

REFERENCIAS:
https://es.wikipedia.org/wiki/Integral_de_l%C3%ADnea
http://www.ual.es/~plopez/docencia/ita/EVA_trasptema9.pdf
https://campusvirtual.ull.es/ocw/pluginfile.php/3961/mod_resource/content/1/tema2/9-ilinea.pdf
https://www.youtube.com/watch?v=bMkzXhyaLm0
https://es.wikipedia.org/wiki/Integral_de_l%C3%ADnea
http://www.ual.es/~plopez/docencia/ita/EVA_trasptema9.pdf
https://campusvirtual.ull.es/ocw/pluginfile.php/3961/mod_resource/content/1/tema2/9-ilinea.pdf
https://www.youtube.com/watch?v=bMkzXhyaLm0
JUNIO
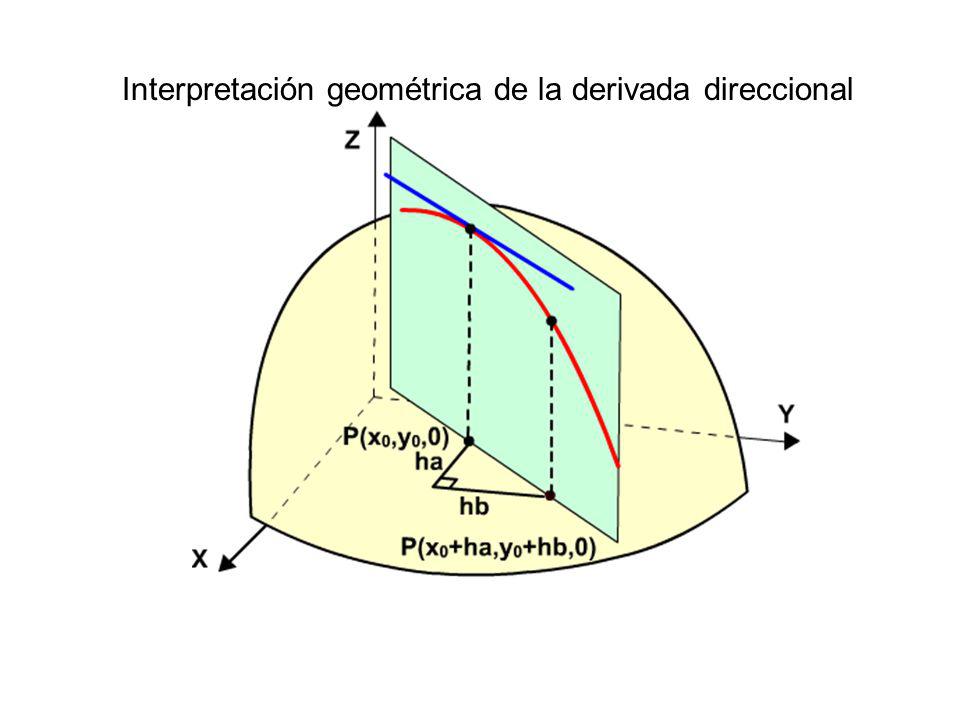
1 .-DERIVADA DIRECCIONAL:
Como ya se estudio anteriormente el criterio de la derivada parcial, que era la razón de cambio de cada cada, en este tema se tomara en cuenta estas derivadas parciales, pero de todas las variables independiente y del unitario de un vector que se dará como dato en futuros ejercicios.
Se une a cada derivada parcial en un vector, dicho vector se lo denomina gradiente.
Analiticamente la derivada direccional viene dada por :












al momento de integrar se pueden presentar tres casos distintos














Como ya se estudio anteriormente el criterio de la derivada parcial, que era la razón de cambio de cada cada, en este tema se tomara en cuenta estas derivadas parciales, pero de todas las variables independiente y del unitario de un vector que se dará como dato en futuros ejercicios.
Se une a cada derivada parcial en un vector, dicho vector se lo denomina gradiente.
Analiticamente la derivada direccional viene dada por :

 |
| http://slideplayer.es/slide/1629127/ |
NOTA 1: Se dice que si la función tiene derivada en cada una de sus variables independientes entonces f tiene una derivada direccional en la dirección de cualquier vector unitario U.
1.1 .-VECTOR GRADIENTE: como ya se menciono antes el vector gradiente es un vector que tiene la caracteristica de tener como componentes las derivadas parciales de cada uno de sus variables independientes, matematicamente el vector gradiente es :

Según la nota uno se puede deducir matemáticamente que la derivada direccional de una función con respecto a un vector unitario U es el producto punto entre dicho vector unitario y el gradiente de la función.
NOTA 2: En la teoría anterior se presento sustento matemático pero tan solo para dos variables, cabe mencionar que el teorema se cumple para n variables.
Formula de la derivada direccional para una función de tres variables.

NOTA 3: Se puede encontrar en futuros ejercicios postulados que pidan la direccion en la cual la funcion crece o decrece mas rápido, para ellos hay dos teoremas que dicen:
- El valor máximo de la derivada direccional es el modulo del gradiente de la función, pero para que sea máximo el vector U debe tener la misma dirección que el gradiente. Caso contrario se dice que el valor sera mínimo.
2 .- VALORES MÁXIMOS Y MÍNIMOS

Como en calculo de una variable se aprendió, se puede saber la forma de una función con sus derivadas, se aprendió a gráficar y para ello se necesitaba saber los puntos críticos de la función analizada (máximos y mínimos) .
Ahora en calculo de varias variables este método de utilizar las derivadas no cambia pero se deben tomar en cuenta mas factores que ayuden a la comprensión analítica de la función que se analizará.
Según la función que se este analizando, dicha función puede tener varios cambios de dirección en su forma, en cada cambio de dirección se generara un punto tope en el cual mencionado punto sera el mayor a todos los puntos que lo rodean a estos puntos se los denominan Maximon o Minimos relativos.
Ahora en ejercicios futuros se pedirá el Máximo o Mínimo Absoluto y este no es mas que el mayor de los Máximos o Mínimos relativos.
MÁXIMOS Y MÍNIMOS RELATIVOS:
Máximo: Una función tiene un máximo relativo en el punto (a,b) si la funcion es menor o igual al valor de la función evaluada en el punto (a,b)

Minimo: Una función tiene un mínimo relativo en el punto (a,b) si la función es mayor o igual al valor de la función evaluada en el punto (a,b)

2.1 .- PRUEBA DE LA PRIMERA DERIVADA
Utilizando derivadas se puede concluir que una función tiene un máximo o mínimo relativo en (a,b) suponiendo que sus derivadas de primer orden existen en ese punto, entonce:
2.2 .- PRUEBA DE LA SEGUNDA DERIVADA
Suponiendo que la segunda derivada parcial de cada variable existe y son continuas en un disco de centro (a,b) ,la naturaleza del punto estacionario se puede determinar mediante el signo algebraico de la segunda derivada y del determinante de la matriz Hessiana.

Sea (a,b) un punto estacionario en el campo escalar f(x,y) con derivadas parciales segundas continuas en un entorno de (a,b) .
Sea D(a,b) la matriz Hessiana de f en (a,b).
Entonces se tiene:

NOTA:
- SI D=0 entonces este análisis no será valido y se recurrirá a otros métodos de análisis.
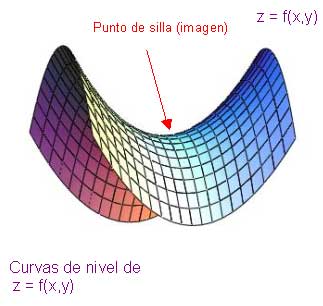
- Si D<0 comment-0--="" de="" dice="" entonces="" hay="" nbsp="" punto="" que="" se="" silla:="" un="">
MÁXIMOS Y MÍNIMOS ABSOLUTOS:
Como se dijo anteriormente el máximo o mínimo absoluto es el mayor de los máximos y mínimos relativos, se calculan de la siguiente manera:

3 MULTIPLICADORES DE LAGRANGE
En los problemas de optimización, el método de los multiplicadores de
Lagrange, llamados así en honor a Joseph Louis Lagrange, es un procedimiento
para encontrar los máximos y mínimos de funciones de múltiples variables
sujetas a restricciones. Este método reduce el problema restringido con n
variables a uno sin restricciones de n + k variables, donde k es igual al
número de restricciones, y cuyas ecuaciones pueden ser resueltas más
fácilmente. Estas nuevas variables escalares desconocidas, una para cada
restricción, son llamadas multiplicadores de Lagrange. El método dice que los
puntos donde la función tiene un extremo condicionado con k restricciones,
están entre los puntos estacionarios de una nueva función sin restricciones
construida como una combinación lineal de la función y las funciones implicadas
en las restricciones, cuyos coeficientes son los multiplicadores
Máximos y mínimos condicionados:
SE llama un extremo condicionado de una función f(x,y) al máximo o mínimo de esta función alcanzado con la condición de que sus variables independientes enten relacionadas entre sí mediante la ecuación:
g(x,y)=o (Ecuación de enlace)
Para hallar los extremos condicionados se forma la llamada FUNCIÓN DE LAGRANGE.

Donde gama es una constante llamada MULTIPLICADOR DE LAGRANGE
Luego se determinan los Máximos relativos de la función de Lagrange.
Matematicamente se siguio probando el postulado y se llego a la conclución de que:

INTEGRALES MULTIPLES:
En calculo de una variable se aprendio que la integral de una función dentro de un intervalo (a,b) representa el area bajo la curva de dicha función.
Para dunciones de 2 variables la inegral representa el volumen bajo la superficie y sobre la region que se esta trabajando.
Tipos de regiones de integraciónEn calculo de una variable se aprendio que la integral de una función dentro de un intervalo (a,b) representa el area bajo la curva de dicha función.
Para dunciones de 2 variables la inegral representa el volumen bajo la superficie y sobre la region que se esta trabajando.
 |
| http://rodas.us.es/file/7cbe1663-15a4-35e1-308e-dafe50bbc603/2/tema7_ims_scorm.zip/page_06.htm |
al momento de integrar se pueden presentar tres casos distintos
- Regiones Rectangulares.
- Regiones más generales.
- Regiones generales.
- Regiones Rectangulares;
En este tipo de regiones como su nombre lo dice tienen la forma de un rectangulo, es decir tanto el eje x como el eje y son constantes y los limites consecuentemente serán constantes.
Cabe recalcar que el orden en el que se desarrolle la integral no importa es decir, se puede comenzar con dx o con dy segun cual sea el camino más facil.
Regiones más generales.
En las regiones más generales se tienen dos partes, en un eje pasará lo anterior osea que sera una constante, mientras que en el otro será una funcion que no sera una recta.
Para resolver este tipo de regiones primero se desarrollara la de tipo variable y luego la de tipo constante, es decir los limites de la integral que esta más adentro seran funciones y los limites de la integral exterior seran constantes.
Cuando la función variable esta en función de x y la constante estará en el eje y:

Cuando la función variable esta en función de y y la constante estará en el eje x:

Regiones Generales:
En este caso la zona de trabajo ya no tendrá ninguna constante es decir en los dos ejes hay funciones variables .
El orden de resolución no importa ya que las dos son variables y el resultado seria el mismo.

El proceso de resolución se realizara con un cambio de variables y mediante la utilización del la matriz jacobiana.
DETERMINANTE JACOBIANA:

La determinante jacobiana se puede aplicar en funciones de cualquier número de variables independientes.
CAMBIOS DE VARIABLE:
Hay tres tipos de cambios de variable que son:
Coordenadas polares: Se las utiliza cuando la región analizada es una circunferencia.
 |
| Coordenadas polares |

Coordenadas Cilíndricas: Se las utiliza cuando la función analizada esta en el espacio y dos de sus variables están elevadas al cuadrado.
 |
| Coordenadas cilindricas |
Coordenadas esféricas: Se la utiliza cuando la función esta en el espacio y las tres variables están elevadas al cuadrado.
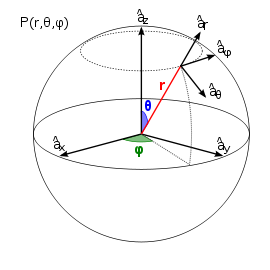 |
| Coordenadas esfericas |
APLICACIONES DE LA INTEGRAL DOBLE:

Suscribirse a:
Entradas (Atom)